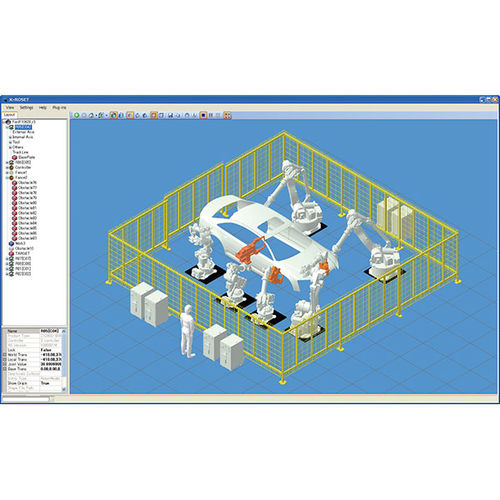
K-ROSET — это автономное программное обеспечение для моделирования роботов Kawasaki. Этот инструмент позволяет пользователю добавлять 3D-модели роботов Kawasaki, периферийного оборудования, роботизированных инструментов и заготовок в виртуальную среду и создавать рабочие ячейки для автоматизации с несколькими роботами. Программное обеспечение имитирует процессы реального контроллера робота Kawasaki и позволяет пользователю взаимодействовать с 3D-моделью робота через подвесные экраны обучения и расположение кнопок. Пользователь может создать полное трехмерное представление рабочей ячейки, написать код робота для конкретного приложения, а затем запустить код робота, наблюдая за движением и логикой робота, не выходя из экрана ноутбука. K-ROSET имеет несколько встроенных инструментов для максимизации эффективности моделирования, таких как обнаружение столкновений, анализ времени цикла и анализ положения установки. Функция обнаружения столкновений предупреждает пользователя, если объекты сталкиваются во время работы программы. Поскольку моделирование обрабатывается виртуальным контроллером робота, инструмент анализа траекторий и времени цикла дает очень точные результаты. Пользователь может вывести видеофайл виртуальной рабочей ячейки в 3D для использования в обзорах проектов и торговых презентациях.
Технические характеристики
ХарактеристикиФункциианализ, моделирование, проектирование, автоматизацияПриложениядля робототехнических приложенийТип3D, офлайн