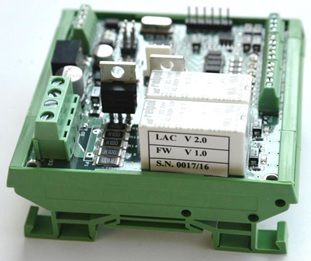
Электронный LAC (контроллер линейного привода): простое решение для управления линейными приводами, приводимыми в действие низковольтными двигателями постоянного тока. Электронный модуль LAC можно использовать для общих применений, в которых используются электрические приводы с обратной связью или без нее. Автономные операции или операции мультисинхронизации возможны через простую и высокоэффективную последовательную сеть (I2C). Устройство основано на простой схеме питания ШИМ. Электродвигатель управляется в режиме мощности/скорости с разомкнутым контуром, торможение осуществляется путем уменьшения команды ШИМ и замыкания проводов двигателя на остановке или на цели. Настоятельно рекомендуется использовать его с винтовыми приводами Acme. Функции позиционирования доступны с датчиком положения с обратной связью. Устройство программируется с: двумя виртуальными конечными ходами, зазором «в положении окна», «макс. сигнализация ошибки последователя, из аналоговой опорной позиции, позиционирования удаленного ПК и синхронизации главного/подчиненного. Точность позиционирования исполнительного механизма зависит от длины хода в случае потенциометра или от общего количества импульсов, входящих в весь ход. Этот модуль может быть интерфейсом к ПЛК или другим модулям управления с оптопарными входными/выходными сигналами на 12/24 уровнях напряжения. LAC поставляется с проприетарным микропрограммным обеспечением сервосистемы, но оно включает в себя «загрузчик» ARDUINO и может быть перепрограммировано пользователем с использованием стандартного последовательного преобразователя Arduino USB и среды IDE программного обеспечения Arduino.
Технические характеристики
ХарактеристикиПараметрылинейный массив, модульный