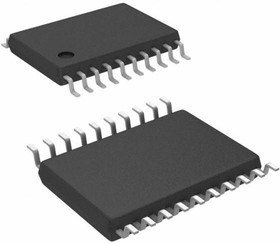

Aurotek MCD451 — это многоосная микросхема управления движением, которую можно подключить к четырехосному шаговому или серводвигателю. Он также может управлять скоростью, положением, а также анимацией многоосной линии и дуги каждой оси, поскольку этим напрямую управляет микросхема. Приводной двигатель вообще не отнимает процессорное время. Команда привода. В основном она делится на количественный привод и непрерывный привод. Количественный стимул заключается в увеличении или уменьшении указанного числа пульсовых волн путем ускорения/замедления или постоянной скорости. Непрерывный привод предназначен для непрерывного вывода импульсной волны привода перед остановкой необходимого ввода сигнала прерывания. Управление скоростью привода Выходная скорость импульса привода может управляться по плавной трапеции в пределах 1~4MPPS, а выходная скорость находится в пределах ±0,1% от диапазона 1~8KPPS. Кроме того, в приводе с выходом пульсовой волны скорость можно свободно изменять или скорость привода можно увеличивать/уменьшать с определенным ускорением и замедлением. Управление местоположением. Для управления положением в диапазоне импульсов от -8 388 608 до +8 388 608 можно использовать два 24-битных счетчика положения с внутренним теоретическим импульсным выходом и внешней импульсной технологией фактической обратной связи. Кроме того, счетчик теоретического положения и счетчик отклонения от фактического положения также могут быть считаны через регистр в любое время. Сравнение ограничений блокнота и программного обеспечения. Три внутренних регистра сравнения могут считывать теорию или счетчик фактического положения и сравнивать соотношение размеров между регистрами. Кроме того, может потребоваться генерирование сигнала прерывания при изменении соотношения величин.
Технические характеристики
ХарактеристикиОпцииуправление двигателем