Product Information
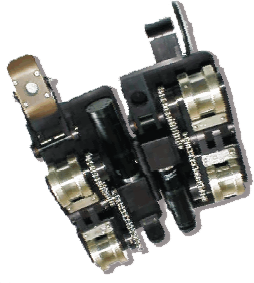
AMAC-500 Crawler
- Clamping force: Over 250lbs (.25 inch thick steel plate)
- Drive force: 200lbs vertical pull at stall
- (4) Wheel Drive
- (4) Wheel Independent Suspension
- Left, Right Steerable, Reversible
- 2.5” Dia Magnetic wheels
- (2) High power DC servo motors
- Advanced design allows adherence to changing surface geometry without time consuming adjustments
- Highly efficient bubbler system which allows the transducer to maintain excellent contact with the scan surface
- Dimensions: (L,W,H) 14” x 12” x 4”
- Weight: 20lbs
MCU-1000 Control Unit
- Direct read position indicator (fed from friction wheel encoder)
- Encoder line driver receiver
- Joystick
- Speed, forward and reverse control
- Emergency Stop button
- Three independent modes of operation
- Speed control with constant forward/reverse operation
- Joystick (dynamic control for steering, speed, forward and reverse motion)
- Remote control using the optional RCU-1000 (remote joystick) or other custom control interfaces
MCU-2000 Control Unit (Optional)
- Menu driven LCD
- Fully programmable motion controller to define virtually any scan pattern required
- Rear Panel access to encoder signals
- Encoder line driver receiver
- Joystick
- Speed, forward and reverse control
- Emergency Stop button
Other Options
- Extended Control cable lengths
- Custom bundled control cable
- Motor mounted Encoders for use with optional MCU-2000
- Interface cable to encoder signals



